In diesem Beitrag möchte ich euch meinen Ardumower vorstellen. Ein Ardumower ist ein Rasenmähroboter, der durch den Arduino Einplatinencomputer gesteuert wird. Nähere Informationen, Pläne, Software, Support usw. findet sich unter www.ardumower.de
Nach vielen Monaten des mitlesen (www.ardumower.de), basteln und ausprobieren wird es Zeit, mein bescheidenes Werk zu präsentieren. Als Basis für den Ardumower habe ich einen defekten Tianchen TC-158N (chinesischer Rasenmähroboter) genommen. Mir gefällt das kompakte Maß des Mower (habe einen kleinen Rasen mit unzähligen Winkeln und Hindernissen) sowie die abgedeckten Räder (kein Aufsteigen an Bordsteinkanten, Trockenmauer usw.)
Als erstes habe ich das Chassis natürlich leer geräumt und einen USB Anschluss sowie einen zweiten Not-Aus angebracht. Im Original gibt es nur einen kleinen Not-Aus am Heck, den man echt suchen muss. Der bleibt aber drin, damit ich einen Not-Aus habe, wenn ich den Mower beim Testen offen fahre. So sieht das gute Stück aus.

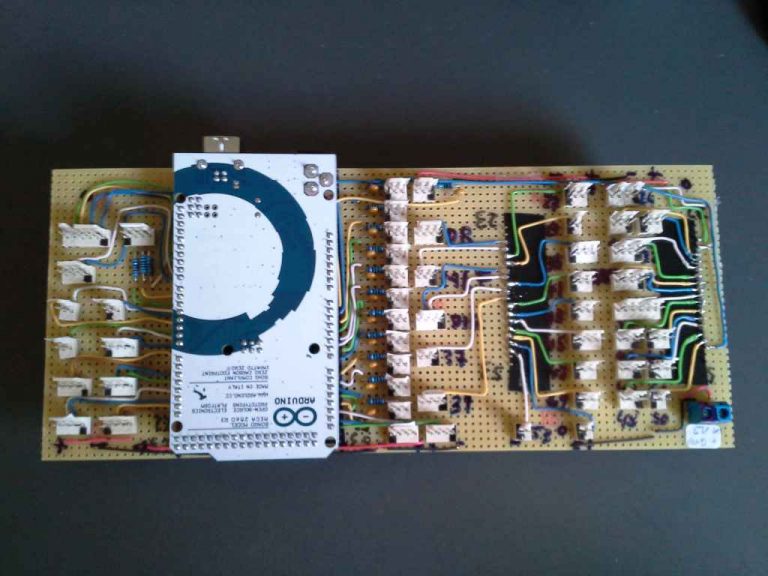
Als Platine kam zunächst ein Eigenbau auf Lochraster zum Einsatz. Im Betrieb hatte ich aber diverse Probleme, Störungen und vor allem unzählige Kabel, von denen einige in die Getriebe zwischen Motoren und Räder geraten sind. Letztlich bin ich auf die PCB 1.2 Platine (www.marotronics.de) umgestiegen. Der Vollständigkeit halber hier meine Platinen
Aktuell sieht es im Mäher so aus



Wie man sieht, verwende ich die L298N Motortreiber, Die MC sind mir zu teuer und die ACS Stronsensoren hatte ich noch von einem anderen Projekt übrig. Den Treiber für die beiden Mähmotoren habe ich mit einem Mosfet und einem Schaltplan aus dem Forum (www.ardumower.de) gebaut.
Gegenwärtig ist verbaut:
– 2X L298N
– 1X Mosfet
– Bumper
– Bluetooth HC-05
– Regensensor (2 Messingkontakte in der Gehäuseoberschale)
– Perimeter (Spule mittig)
Nächste Schritte
– Garage mit Ladeanschluss
– Hebesensor um Anheben zu erkennen (Pin35 Tilt)
– Ultraschall
– Odometrie (noch keine Idee wie)
– ggf. Remote über original Fernbedienung
Zur Zeit kommt als Software die Version 1.04 Azurit mit einigen Modifikationen (Bug Fix, Anpassung manueller Modus)zum Einsatz. Die Änderungen werden jetzt, soweit erforderlich, in der 1.05 nachgezogen und hier dokumentiert.