Kurzes Update von meiner Seite zum Stand der Ardumower Turtle Bot Version.
Nachdem eine minimale ROS2 Implementierung fertig war (Ardumower <-USB-> RPI) habe ich mich länger mit micro-ros und dem ESP32 beschäftigt. Beides neue Welten für mich, da hat es etwas gedauert.
Der ESP32 hängt nun an der Stelle, wo früher das WLAN Modul auf dem PCB1.2 untergebracht war. Der Mower kommuniziert nun nicht mehr über den USB Port, sondern über eine andere serielle Schnittstelle. Dies hat den Vorteil, dass USB für Debugging und Konfiguration frei bleibt. Der ESP32 betreibt zwei Tasks, einer der UART überwacht und ankommende Daten in eine Queue schreibt. Ein zweiter Task führt micro-ros aus und sendet aktuell die Daten einfach als String Nachricht ins ROS2 Universum.
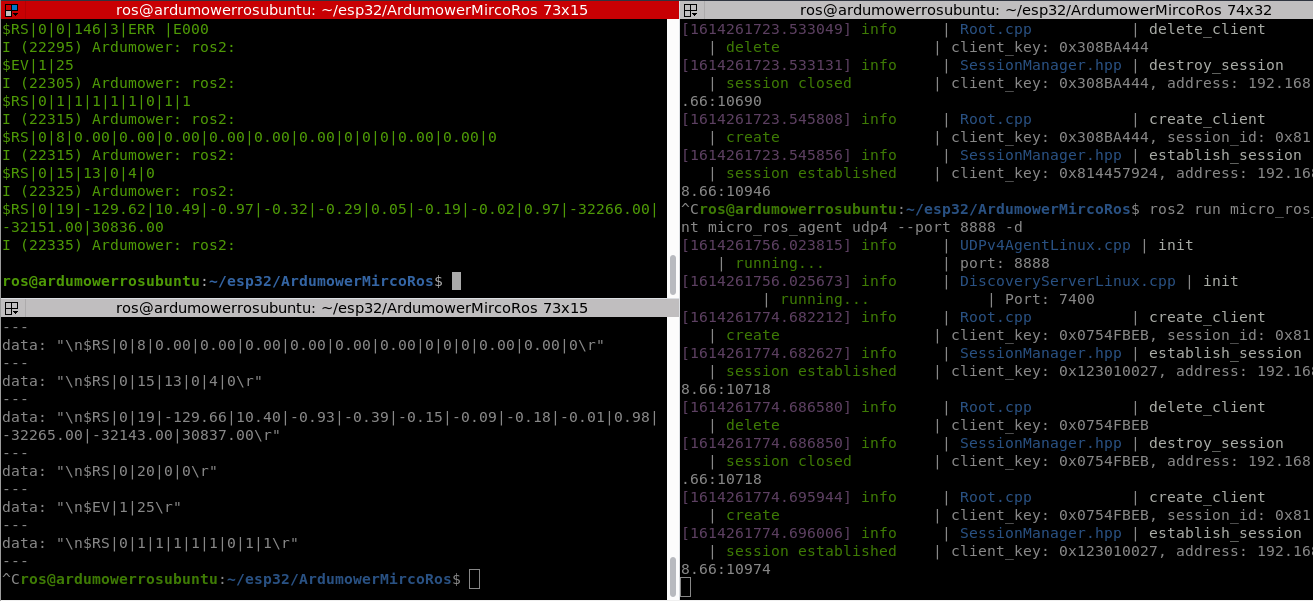
Auf dem Screenshot zu sehen, oben links die Konsole des ESP32, unten links die Nachrichten innerhalb der ROS2 Umgebung und rechts der micro-ros Agent, welcher ESP32 mit ROS2 verbindet.
Als nächstes werde ich die Nachrichten auf dem ESP32 direkt in die ROS2 Nachrichten überführen und diese publishen. Später hat man dann viele Optionen, wie man den Mower über ROS2 anbindet:
1. ESP und per WLAN an einen zentralen ROS2 PC (z.B. RPI)
2. RPI an UART und per WLAN an zentralen ROS2 PC (verteilte ROS2 nodes)
3. ESP und per USB/LAN/WLAN an RPI, welcher im Mower mit fährt (unwahrscheinlich aber machbar)
4. RPI an UART, ROS2 läuft auf RPI im Mower
Was da am besten klappt werde ich sehen. Ob WLAN Latenz viele Probleme machen wird, ebenfalls. In allen Fällen bedarf es eine Art Bridge zwischen Ardumower und ROS2. Diese bildet entweder der ESP32 mit micro-ros, oder ein RPI mit serieller Verbindung und den zuvor entwickelten ArdumowerROSDriver
In allen Fällen haben wir später echte ROS2 Nachrichten innerhalb des ROS2 Universums. Wie der Mower angebunden ist, remote per WLAN oder ROS2 im Mower, spielt dann keine Rolle.